ヒトもすなるblogといふものをネコの私もしてみんとて、するなり。
2006年07月23日
研究者自身のコピーロボット「ジェミノイド」公開
家のパソコンが軒並み調子が悪くてなかなか更新できないCopyCatです.
研究室から借りているノートPCまで調子が悪いってどういうことよ?
なんか悪いものでも憑いているのだろうか…
久々の更新はいつの間にか少し調子がよくなってたデスクトップからです.
今日の気になりはATRで大阪大学の石黒教授そっくりのロボットが発表されたニュースです(Robot Watch).
記事を見た率直な感想
似すぎてて怖い…
よくここまで似せられるなと感心しますが,やっぱり怖い…
そしてさらに怖い想像.
これ,自分の教授の顔だったらどうします?
さらにメンテナンスするのが自分だったらどうします?
たとえば動作確認のために向かい合う教授の顔をしたロボットと自分.
こっちみてる(((゚Д゚;)))
そしてメンテナンス時にはぎ取られる教授の顔面,むき出しになる中身(((゚Д゚;)))
首だけが机におかれアラレちゃん状態の教授の顔(((゚Д゚;)))
自分には無理ですorz
まじめな話だと,このロボットは人間の”存在感”を研究するために作られたものらしいですね.
ロボットを動かしてみて,なにがその人”らしさ”を形作っているのかを探る試みらしいです.
ただ個人的な感覚だと,そういった研究ならば逆に本人にはあえて似せずに,パーマンのコピーロボット並にシンプルなものを使った方がいいんじゃないかなとも思う.
これはその人の研究哲学に影響しているのだろうから何ともいえないけど,自分の立場だとその人をその人たらしめているものとして明らかに重要な”顔”とか”声”のようなものをあえて制限することで,もっと本質的な”その人”を見つけ出せるんじゃないかと思います.
ここまで似すぎていると,逆にその見た目に引っ張られて正常な判断ができなくなっちゃうんじゃないのかな?
このロボットでチューリングテストをやったら,別人が操作しているものと本人が操作しているものを見分けさせようとしてもなまじ顔が本人にそっくりなせいで,機械的な制限で起こる動作の違和感と顔のギャップで本人すら本人じゃないと判断しちゃいそうな気がする.
詳しい人意見求む.
2006年05月29日
Robomech2006 二日目
Robomech2006
行ってきました,Robomech2006.
といっても会場はウチの大学だったので,行ってきたというのはちょっと違いますが.
今回はウチの研究室からも結構な人数が発表していたので,会場の一角が知り合いだらけな状況でした…
で,個人的に一番気に入った発表は写真のロボットです.
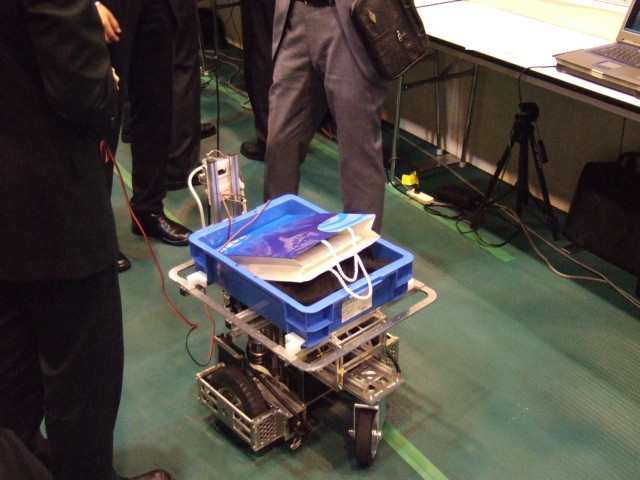
このロボット,紐を引いた方向についてくるのだけど,個人的にスゴイと思ったのは紐を張らないでついてくるってこと(動画).
要するに力を全くかけずについてくるんです.
仕組みは意外と単純で,エンコーダ二つで紐のたるみ角度を一定に保つように移動するだけです.
でも,逆にそのシンプルな発想で直感的にロボットをついてこさせるのがスゴイです.
研究者って,ついつい画像処理をさせたりとか"高度な"情報処理をやらせようとしちゃうんですよね.
でも,個人的にはそんな高度なことしないで機構の工夫なんかでこういうことをやれる方が好きで,そんなアイディアが思いつく人は本当にスゴイと思います.
でもそこの研究室の人と話をしていたら,ちょっと怒られてしまいました…
そりゃぁ,大学の廊下でこんな↓ことをしていたら怒られますね(´・ω・`)

でも反省はしてるけど後悔はしてません.
あとは後輩と別の班の友人が発表していたのでその写真もついでに載っけちゃえ〜
ウチの班の後輩は一生懸命説明してました.

遠巻きにカメラを構えたのにしっかりピースしてます.
そしてよく見ると更に後ろの方にはあの人の姿が…
今回は色々な方のお話を直接聞けて勉強になりました.
参加された方々はお疲れ様でした!
2006年04月09日
インテリジェンスダイナミクスシンポジウム2006
就活でしばらく更新が不定期になってます.
7日はSONYのインテリジェンスダイナミクスシンポジウム2006に参加してきました.
SONYのインテリジェンスダイナミクス研究所が研究している成果報告なんかをしています.
去年も参加したのですが,毎年各界の有名人が勢揃いという感じです.
東大の國吉先生とか,理研の谷さんとか,けいはんなの小嶋さんとか,立花隆さんとか,茂木健一郎さんとかとか…
講演もなかなか興味深かったのですが,その中でも特におもしろかったのは小嶋さんの自閉症の子供とKeeponを数ヶ月間一緒に過ごさせて様子を観察したものと,田中さんのアメリカでQRIOを一年近く幼稚園で子供と一緒にして観察した二つでした.
最近自分の中でも,「コミュニケーションロボットを論じるのなら,長期にわたって日常生活の中でロボットを動作させないと本当の結果は得られないんじゃないか」と考えていたので,まさにドンピシャという感じで面白かったです.
あとは研究所の成果報告で,RNN(リカレントニューラルネットワーク)とSOM(自己組織化マップ)を組み合わせたQRIOの動作学習デモをやったりしていたのですが,正直こっちはビミョーでした.
詳しい説明は長くなるので省くけど,要はSOMの一つ一つがRNNを持っているイメージです.
発表では12x12のSOM上で24種類の動作のうち適切なものが自動的に選ばれるようなことを言っていたのだけど,それだったら動作数分だけRNNを用意して切り替えればいいワケで,144個もRNNを用意する必要がないと思うんですよね…
そう思ってデモの時に残りのRNNはどうなってるのか質問したら,やっぱり余りのRNNは単体だと動作が途中で停止したりして意味のある行動は発生しないみたいです.
なので「じゃあSOMを使う利点ってなんなんですか?」と質問したら「動作の切り替わり時にそれぞれのSOM上を通過していくのでなめらかに切り替わる」と言われました.
うーん…なめらかに切り替わるだけなら別にわざわざクラスタコンピュータ使って24時間も学習させないで,直接なめらかに切り替える方法を考えればいいんじゃないのかな…?
その他のRNNが何か新しい振る舞いとかを創発するのならすごいんだけど.
なんだかよくわからない成果報告でした.
そういえば質問したとき研究員の方,ビミョーな顔してたなぁ…
もしかして聞いてはいけないことを聞いてしまったか?
2006年03月03日
地面のダニを退治するロボット
海外の話ですけどバージニア士官学校で地面のダニを退治するロボットが開発されたみたいです(Wired News)
デニムの布を引きずって自走してるとダニが自分から布を上ってきて,そこに染込ませてあった殺虫剤で殺してしまうとか.
発想はシンプルだけど実際には自律走行するための仕組みとか色々考えなきゃいけないわけだし,こういう実用的なロボットはいいですね.
殺虫剤をばら撒いて環境負荷を高めることなく,機械的な方法で解決する.
まさしくRT(Robot Technology)なワケで,すごく好きです.
2006年02月21日
インテリジェンス・ダイナミクス2006
今年もやってまいりました.
ソニー・インテリジェンス・ダイナミクス研究所株式会社による第三回シンポジウムが4月7日に開催されます.
ここでは環境とロボットの実際の相互作用を通して知能に迫るような研究をしているところなのですが,去年参加したときに非常に勉強になったので今年も参加してきますヽ(´ー`)ノ
申し込み人数に限りがあるので興味のある方はお早めにどうぞ.
2005年11月04日
心を感じるとき
ヒトがどんなときに心を感じるのかを考えていたら,なんとなく心はNP問題に似ていると思った.
NP問題は問題とその解が与えられたとき,それが正しいかどうかはすぐに判断できるのに,実際にその解を導くのが難しいような問題のことです.
例えば犬を叩いたら激しく吠えられたとする.
そうしたとき叩いたから怒って吠えたと考えるけど,それは実際に吠えたのを見て「叩いた→痛い→怒る→吠えた」という風に因果関係がもっともらしく思えるから.
けれども実際に吠えるかどうかはある程度は予想できても完璧には予想できないし,ひょっとしたら別な行動をするかもしれない.
その場合もやっぱりある程度は適当な理由を想像してもっともらしく思えるだろうし,逆に理由をつけられない行動ばかりしたらあまり心というのを感じないんじゃないかと思った.
そんなことをふと思った週末の夜.
2005年10月24日
修論計画備忘録
そういえばこの間班の中で修論計画発表やったんで,そこでの話を備忘録.
とりあえず最近まで色々と勉強してました.
このページで載せた本以外にも,技術書とか認知科学の本とか専門的過ぎて感想を書けないような本とかも読んでましたから.
んで,自律ロボットとしてこれまでの研究室での成果やよく用いられる手法なんかを整理して問題点を発表するのが精一杯という感じでした…(´・ω・`)
一口に自律ロボットといっても範囲はかなり広いので,ウチでの研究では基本コンセプトとして「設計者の意図をなるべく排除して,ロボットのハードウェアと環境に基づいて行動を創発する」ことになってます.
これだけでももうワケがわからんですね.
これまで研究室では「自分を守る・保存する」という行動規範でロボットを動かしていました.
例えば回路の温度が高くなりすぎたら冷却ファンの回転数を上げたり,バッテリーの残量が減ってきたらモータに流れる電流量を減らすような行動になるといった感じです.
また,実際に行動に移す場合も中央集権的な制御をさせるのではなく,各モータが独立した判断で行動を起こさせるような手法をとっています.
これらの方法は生き物の行動の比較的原始的な部分を参考に提案されたものです.
他にもニューラルネットや強化学習,進化的計算なんかの勉強もして色々考えたのですが,どうしてもいつも気になるのがこういったものの根本であるセンサ情報や行動の価値を設計者が決めていることです.
達成したい目標がそれぞれ違うので一概には言えないのですが,ウチの研究室でいえば大分原始的な部分からロボットの自発的な行動を行わせたいので,そもそもそセンサの情報をどう評価するかという部分が重要になってくるはずです.
これまではこの部分は設計者の手で決められていたため,先輩では人間とのコミュニケーションに主眼に置いた方法でこういった問題を解決しようとしてる人もいます.
ただ,個人的に最近人工生命(Artificial Life)に近い部分に考えが寄っているせいか,どうにかしてこれをさらにロボット自身に獲得させられないかな〜と考えています.
一応こうしたらどうかという提案はしてみたのですが,話を一般論に拡げすぎてるせいでロボットのハードと環境との関係をおろそかにしすぎていると注意されました.
逆にそこの部分をしっかり詰めていけということでもあるので,ここからはもう少しその部分を考えていかなければですね…
2005年10月06日
研究室のWebページ
だいぶ前に研究室のサーバが完全に壊れてしまって新しいサーバを買ったのに,Webページの復旧をするのをすっかり忘れていたら教授に怒られてしまいました…
むむぅ,ページ自体はだいぶ前にできていたのにアップロードをするのを忘れていたとは不覚orz
2005年09月25日
「心」について頭の中を整理してみる
ロボットの「心」について色々考えていたらマスマスまとまらなくなってきてしまったので,頭の整理にblogへ投げてみる.
そもそも「心」とはなんなのかといえば,一般的には「知(知能)・情(情動)・意(意思)」の三つから成り立っているといわれてる.
じゃあそれがロボットに限らず生き物にあるといえるかの判断は,かなり乱暴だけど観察しているヒトの主観的な判断以外に存在しないはず.
この辺は研究室での方針であって,犬に心があるかどうかと尋ねれば大抵のヒトがあるというだろうけど,犬なんかに存在しないというヒトもいるからやっぱり主観的なものになると思う.
だから今のペットロボットだって,叩かれれば怒るし撫でれば喜ぶのだから「情」の部分はあるといえるのかも.
でもこれは「情」の中でも「感情」に関する部分だけに限られていて,たとえばお腹が空いたとか,疲れたとかの広い意味での「情動」行動は示さないし,そこまでやろうとしたら設計者はかなりの数の行動パターンを考えてやらなければならない.
だからこそロボット自身に「創発」してもらいたいワケだけれども,それにしても行動を起こすには仮説としてなにか行動基準が必要になる.
この基準をウチの研究室では「自己の保存」という観点に見出している.
叩かれれば壊れる危険があるとか,激しく動いてバッテリーの残量が危ないとかそういった状態を回避するために起こす動きが,結果として「怒っている」とか「お腹が空いている」という状態に見えるのではないかということ.
ドーキンスの「利己的な遺伝子」でいくと,それはさらに「遺伝子」の保存のための行動にまで細かくなるけど概ね一致しているのかな?
ここまではこれまで研究室で行われてきた成果.
上の例の「怒っている」とか「お腹が空いている」というのは「知・情・意」の中では「情」寄りに属している部分だけど,「自己の保存」は多分これだけで終わるものじゃないような気がする.
「利己的な遺伝子」の影響をかなり受けているせいかもしれないけど,行動戦略すらも遺伝子の繁栄の成功・不成功に依っているのだから.
そもそも「知・情・意」の三つは複雑に絡み合ってその境界すら曖昧なものだから,個人的にはそろそろ「知」か「意」の方向を絡めて攻めていってみたいなぁ…
そのためにニューラルネットだの強化学習だの,進化的計算だのの機械学習を調べたり,認知科学系の本を色々読んだりしているけれど,調べれば調べるほど生物の巧みさにヘコむばかり…(´・ω・`)ドウシヨウカネェ
2005年09月17日
ホムンクルスとは
刹羅さんから9月14日の記事に関連してホムンクルスについて質問をいただいたのでこの話を.
正確には「ホムンクルス誤謬」なんて呼ばれている問題で,ホムンクルス自体は元々昔の錬金術師が作ったといわれる「小人」の人造人間のことでした.
ただ「ホムンクルス誤謬」の話になると,心理学や脳中でのプロセスの循環性についての話題になります.
知能とは頭の中に「賢い小人」がいて,その「小人が」ヒトの記憶を探したり好き嫌いの判断をしてくれているからだと仮定します.
すると今度はその「賢い小人」の「賢さ」はいったいどこから来ているのかと考えたら,またその「小人」の中に「小人」がいて,その「小人」の中にまた…と無限ループになってしまいます.
「小人」を仮定しなくても,脳の中のどこかに意思などを司る中枢があってそれが脳の全体を見渡していると考えても同じようなことになってしまいます.
この無限ループになってしまうことを「ホムンクルス誤謬」と言っています.
だからといって単純に脳でやっていることだと言ってしまえば楽だけど,そもそも脳の中の神経細胞は単なる細胞であって,それを一個取り出しても絶対に「知能」や「心」は表れないはずです
その意思を持たない細胞からどうやって意思らしきモノが生まれているかの答えにはなっていません.
ロボット学会で聴いた下條信輔氏の講演で,最近では脳の研究でも「腕を動かそう」と意図した瞬間より数百ミリ秒早く,脳の腕を動かす部位が準備を始めているという結果が出ているそうです.
「脳はなぜ「心」を作ったのか」でも触れられていたことだけれども,この結果からひょっとしたら「自由意志」というモノも実は存在しないのではないかなんて話も出ていたり,なかなか難しい問題です.
まあ「自由意志」に関して言えば,脳の活動が意図した瞬間より早いからといって,それもひっくるめて「私」の脳の活動の結果だと考えれば広い意味での「私」の「意志」だと言えなくもない気がします.